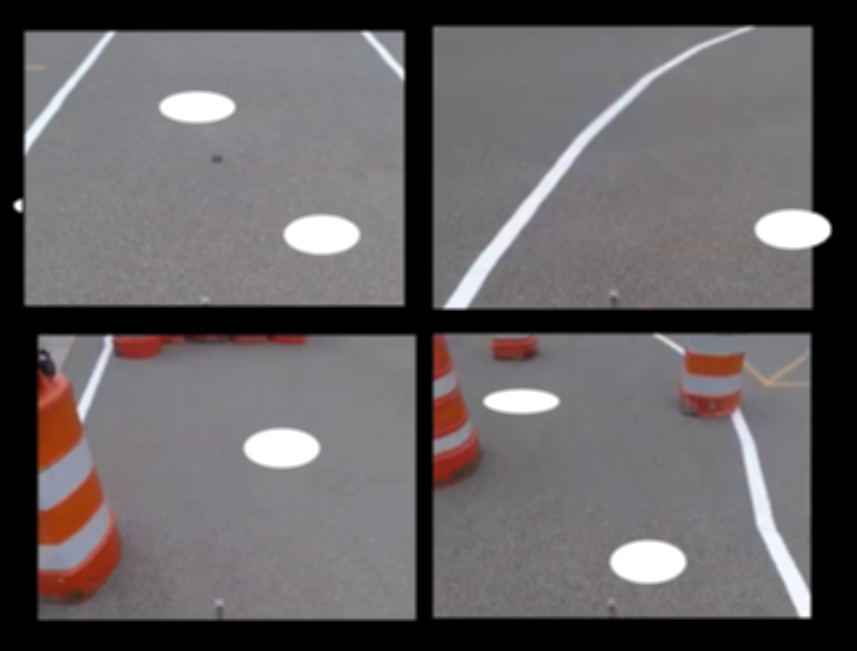
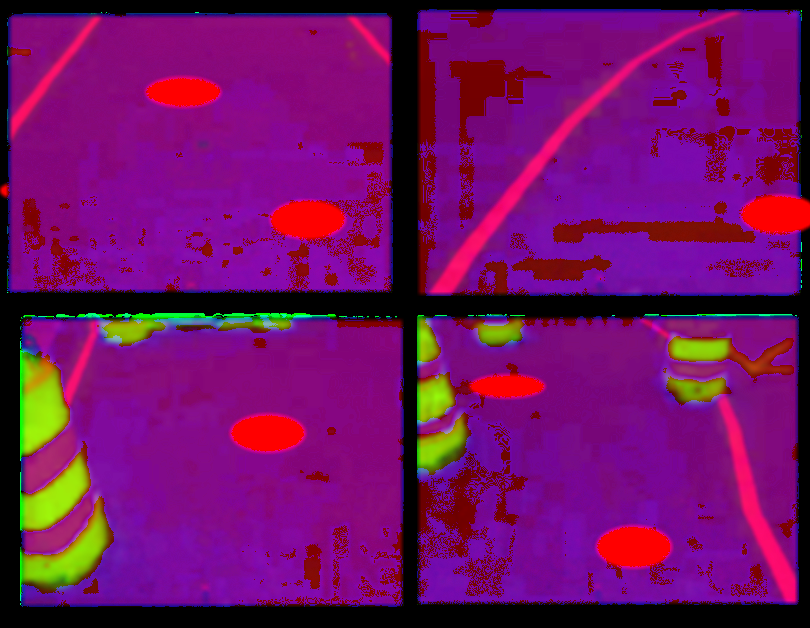
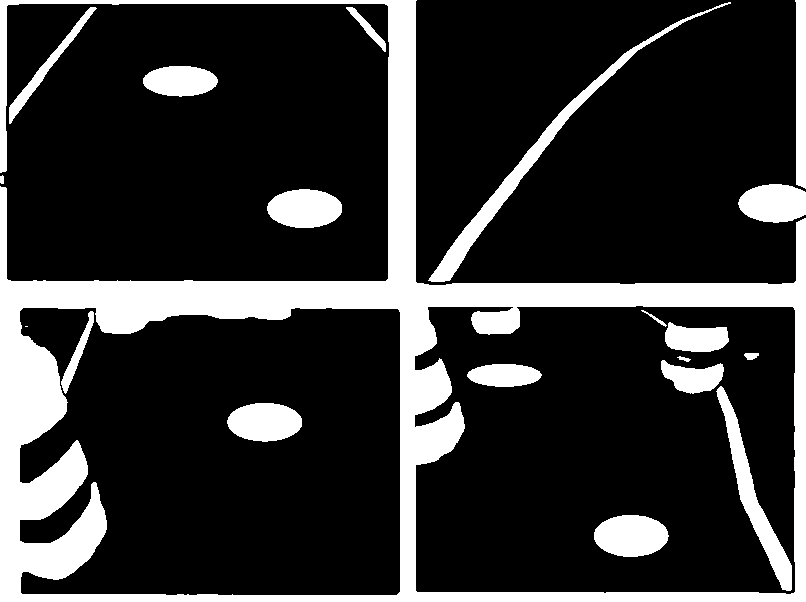
UT RAS (IGVC)–Lane and Obstacle Detection Algorithm Computer Vision algorithm for lane and obstacle detection on the IGCV track. Can detect cones, curbs, lines, and potholes with high accuracy. Technologies used: OpenCV, Python Share on Twitter Facebook LinkedIn Previous Next